I/ Description du matériel et des logiciels utilisés durant le projet
PLAN
I.1/ Partie bras réel
I.2/ Partie modélisation
I.1/ Partie bras réel
Bras?
Voici les dimensions du bras :
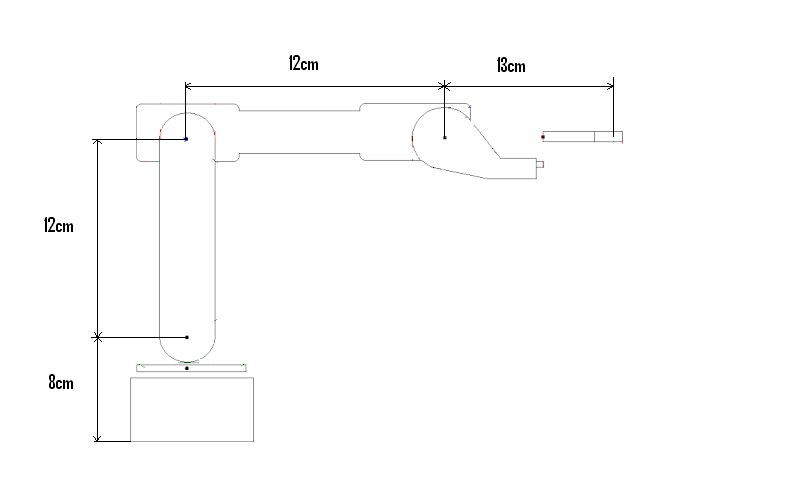
Le bras est composé de 7 servo-moteurs de modèle HS-475HB montés sur un structure en PVC. Chacun commande l'une des 6 articulations du bras-robot. Le moteur B regroupe en réalité de 2 servo-moteurs, afin d'offrir un couple suffisant pour soulever la quasi-totalité de la structure. Consultez pour en savoir plus sur le fonctionnement des moteurs.
Le bras est fixé à un socle, d'une part pour garantir sa stabilité et d'autre part pour offir un plan de coordonnées fixes et quadrillées. L'intérêt est de pouvoir situer précisément un objet (un cube) à la fois dans la scène réelle et virtuelle.
Coté câblage, chaque servo-moteur du bras nécessite trois fils en entrée :
Au final, 21 fils sont nécessaires pour alimenter et commander la totalité des servo-moteurs.
Le bras est fixé à un socle, d'une part pour garantir sa stabilité et d'autre part pour offir un plan de coordonnées fixes et quadrillées. L'intérêt est de pouvoir situer précisément un objet (un cube) à la fois dans la scène réelle et virtuelle.
Coté câblage, chaque servo-moteur du bras nécessite trois fils en entrée :
- Une alimentation Vcc (5V)
- Une masse Gnd (0V)
- Un signal de commande
Au final, 21 fils sont nécessaires pour alimenter et commander la totalité des servo-moteurs.

Afin de commander ces servomoteurs, nous utilisons un micro contrôleur M32C83.
Le bras est connecté au micro-contrôleur via une liaison de ports entrée / sorties.

Une fois le bras relié au micro contrôleur, il nous reste plus qu'as lui envoyer les commandes des moteurs.
Micro-contrôleur?
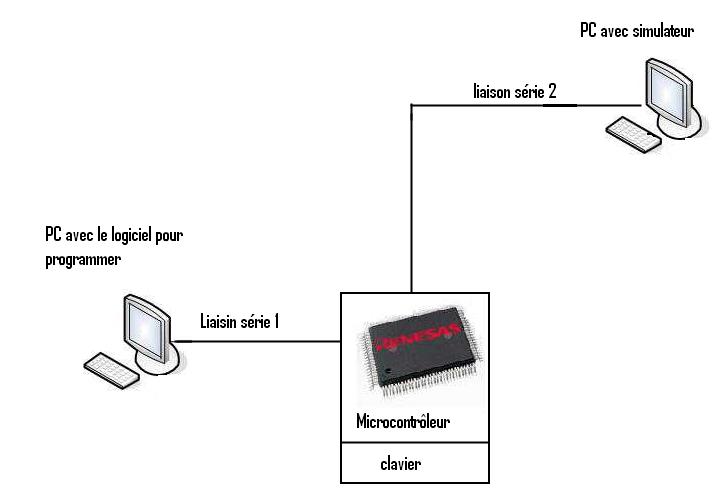
Nous utilisons un micro-contrôleur Renesas de type M32C83, implanté dans une maquette de développement contenant :
- Un clavier 24 touches (pilotes fournis)
- Un afficheur LCD 4 lignes / 20 colonnes (pilotes fournis)
- Deux liaisons série (pilotes fournis)

Le micro-contrôleur est relié au simulateur (Raydium) par une liaison de type RS-232.
Une autre liaison série permet de le relier au logiciel de développement (HEW).
I.2/ Partie modélisation
Pour modéliser ce bras, il y a 2 parties principales à faire.
- Partie moteur 3D qui sert à créer les objets qui composentle bras et gérer plusieurs paramètres comme les liaisons, les moteurs, les collisions ...
- Partie rendu qui sert à donner à notre bras une apparence la plus proche possible de la réalité.
Pour ces 2 partie nous avons utilisé plusieurs logiciels et bibliothèques.
- Moteur 3D => Raydium et ODE
- Rendu => blender
Voici la présentation de ces 2 parties.
Raydium / ODE?
Raydium : c'est un moteur de jeu qui se présente sous forme de plusieurs fonctions simples pour rendre l'écriture d'un jeu 3D souple et rapide.
Présentation de raydium sur le site : http://wiki.raydium.org/wiki/Raydium
ODE : Open Dynamics Engine est une bibliothèque logicielle permettant de simuler des interactions physiques.
Nous avons choisit raydium comme moteur physique car il est très simple à utiliser et ses bibliothèques sont open sources (libre au téléchargement et à l'utilisation). De nombreuses fonctions faisant partie de raydium simplifient énormément la programmation d'un moteur 3D.
Pour pouvoir utiliser Raydium, il faut télécharger son SDK qui est gratuit : http://freeway.raydium.org/data/RaydiumSDK.zip
Pour utiliser cette bibliothèque et écrire notre programme, nous avons utilisé l'IDE Code::Blocks. Cette application est aussi gratuite, très bien présenté et son utilisation est simple. http://www.codeblocks.org/downloads/5
Voici comment se présentre Code::Blocks
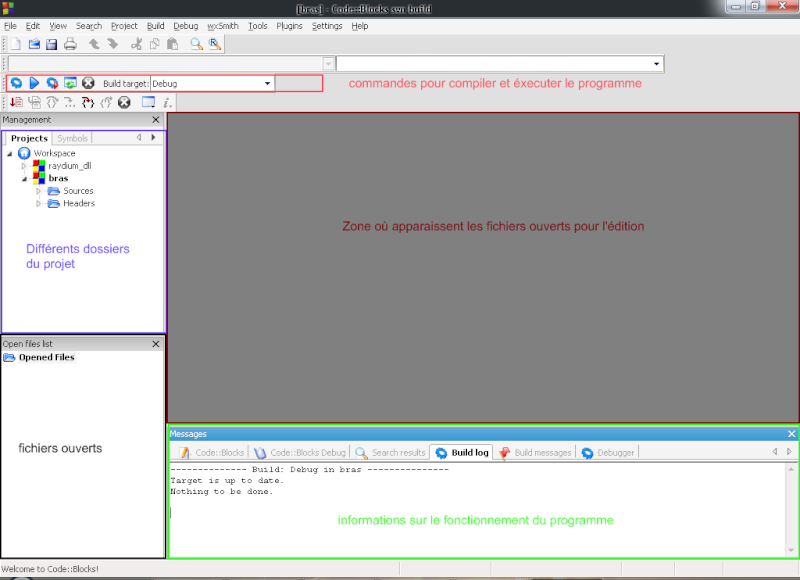
Pour pouvoir utiliser le moteur 3D, il faut créer un projet. Ensuite il faut inclure toutes les bibliothèques à ce projet. Puis constuire ce projet en cliquant droit dessus dans la fenêtre de gauche et en choisissant "Build".
Ensuite il faut créer un autre projet qui contiendra lui les fichiers qui serviront à programmer le bras. Et dans le fichier principal qui contient la fonction "main", il faut inclure un fichier qui s'appelle "index.c" en écrivant ceci :
#include "raydium/index.c"
Enfin il y a juste à compiler et à lancer le programme.
N.B. : il faut bien s'assurer que le projet activé n'est pas celui des bibliothèques de raydium. Pour celà, il faut cliquer droit sur le projet qui contient le fichier pur programmer le bras et choisir "Activate project".
blender?
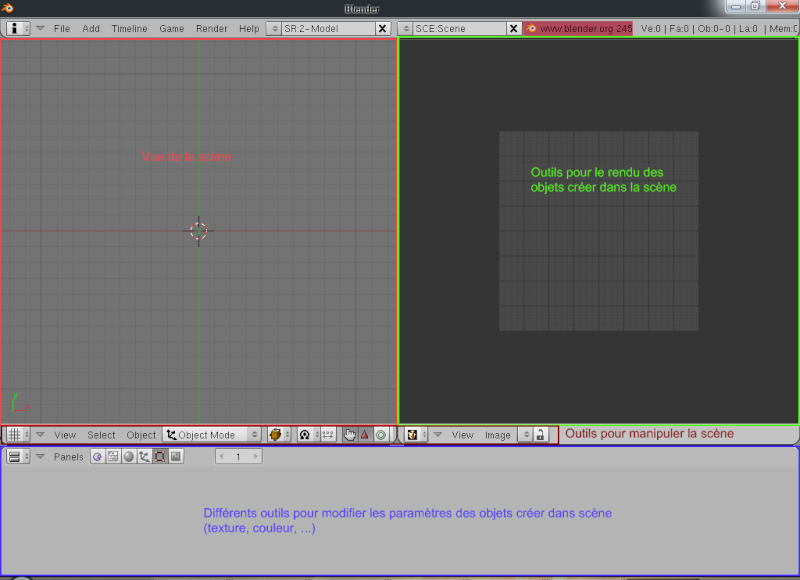
Blender est un logiciel permettant de créer des objets, des paysages avec des dimensions et des textures précises.
http://fr.wikipedia.org/wiki/Blender
Blender dispose d'énormément de fonctions pour créer une scène avec différents objet, modifier leur texture. Dans le cadre de notre projet, nous l'avons uniquement utilisé pour texturer les objets créés sur Raydium. D'autant plus qu'une extension existe dans Blender qui permet de créer des fichiers ".tri". Ce sont ces genres de fichiers qui sont compatibles avec Raydium pour donner une texture à un objet.
Voici comment se présente Blender :
Nous verrons avec plus de détail ce logiciel dans la partie Modélisation du projet.
Si vous voulez utiliser la partie simulation du projet : ftp://cqfd-corp.org/uploads/ProjetBrasRobotise.rar
Ce ficher ".rar" contient tous les fichiers nécessaires à la programmation du projet.
Si vous voulez simplement utiliser le projet téléchargez celui-ci : ftp://cqfd-corp.org/uploads/BrasRobotise.rar
N.B. : si vous n'arrivez pas à commander le bras avec les touches du clavier, c'est peut être à cause de votre port série. Appuyez alors sur la touche 'p' puis retestez.
Retour