Ceci est une version archivée de robot_6DDL à 2008-03-25 10:55:10.
Licence Professionnelle Informatique Embarquée et Robotique de L'IUT de Clermont-FerrandProjet Bras Robotisé
Promotion 2007/2008
| Nom | Taches Réalisées |
| BONNETIER Romain | Commande bras + matrices de déplacement |
| PAOLETTI Mickaël | Modélisation bras sous raydium et blender |
| PRADELLE Maxime | Commande bras + liaison série |
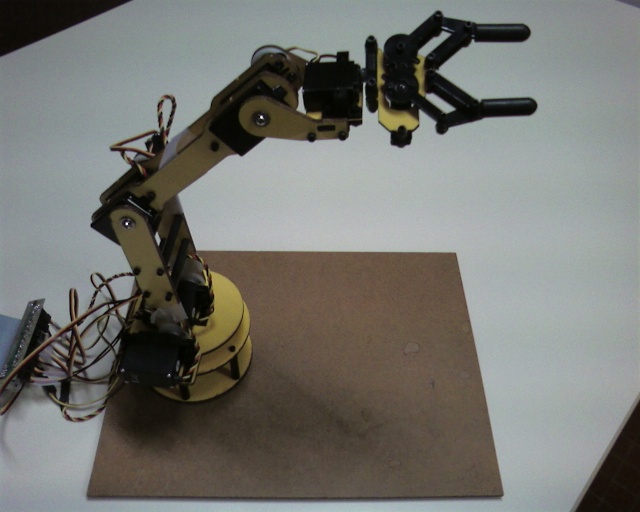
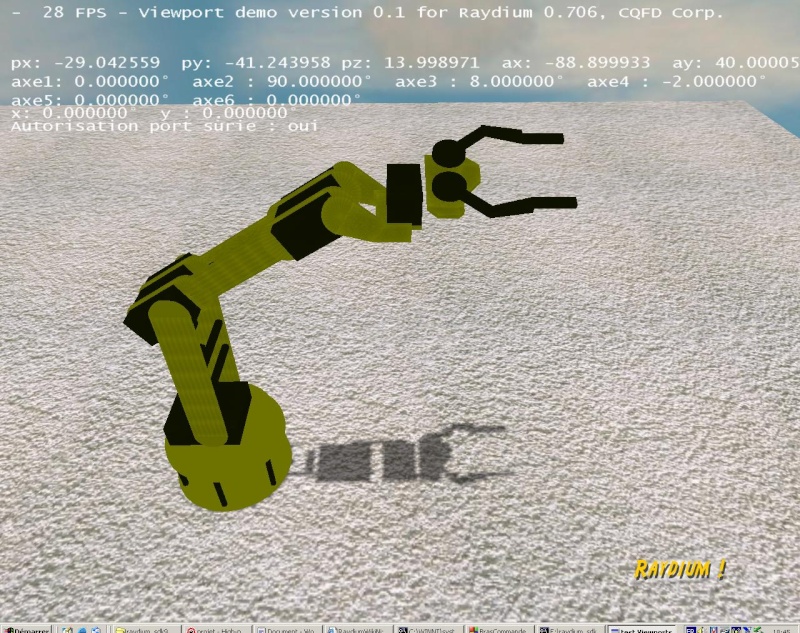
Dans le cadre de notre licence professionnelle informatique embarquée et robotique, nous avons eu l'opportunité de mener à bien un projet, consistant à commander un bras-robot asservi avec 6 degrés de liberté. Conjointement, il s'agissait de renseigner les moteurs graphiques Raydium et ODE sur l'angle affecté à chaque moteur du bras, pour pouvoir le représenter lui et quelques éléments de son environnement (un cube, par exemple) dans une scène virtuelle. L'intérêt de cette manipulation est de rendre compte des éventuelles différences entre la réalité et le moteur 3D.
Le programme de commande du bras est stocké sur un micro-contrôleur M32C83 de la marque RENESAS (site officiel) et géré par le noyau temps réel MR308.
Pour ce faire, nous avons divisé les différentes tâches entre 3 étudiants. Nous allons détailler les différentes étapes de notre conception du projet :